
Застосування морських безпілотних апаратів – перспективна тема для розвитку вітчизняних науки та виробництва. У зв’язку з тим, що це відносно новий напрямок для світового суднобудування, у нас є шанс вже на старті мати приблизно однакові позиції з іншими гравцями. Звісно, якщо провід держави підтримає дослідників, які сьогодні працюють значною мірою на ентузіазмі. Успіхи ударних дронів ВМСУ, що разом іншими видами вогневого впливу примусили російський флот відмовитися від тотального панування на морі, дозволяють сподіватися, що наші надії на це не безпідставні.
Пропонуємо до вашої уваги статтю, в якій резюмовано досвід проєктування морських безпілотних платформ в Національному Університеті Кораблебудування (НУК). Автори статті – Олександр Бондаренко, канд.техн.наук, професор, директор Кораблебудівного інституту НУК та Андрейс Звайгзне, доктор інженерних наук, асоційований професор Інституту транспорту та телекомунікацій (Рига, Латвія). Статтю було опубліковано в збірнику XIV Міжнародної науково-технічної конференції “Інновації в суднобудуванні та океанотехніці”, що в онлайн-режимі відбулася 20-21 вересня 2023.
Від нашої редакції зазначимо, що ціль статті – ознайомити фахове середовище з самим фактом того, що роботи за темою ведуться. Стаття не розкриває технічних подробиць, але посилається на вже виконані роботи. Олександр Валентинович Бондаренко – відомий український вчений, один з засновників вітчизняної школи проєктування суден з малою площею ватерлінії. Весь апарат та методика проєктування таких суден ретельно пророблені в численних попередніх дослідженнях та апробовані при захисті дисертацій.
Тому ми ще раз підкреслимо свої сподівання, що держава зверне увагу на вже виконану працю власних науковців. Створення спеціалізованої лабораторії, фінансування дослідницьких програм за означеною темою гарантовано дасть результати і дозволить Україні посилити свої позиції на морі як під час війни, так і при видобутку та експлуатації морських ресурсів після перемоги.
ДОСЛІДНИЦЬКЕ ПРОЕКТУВАННЯ ШВИДКІСНОЇ МАЛОЇ ПЛАТФОРМИ-ДРОНУ
Аналіз сучасних подій, пов’язаних із застосуванням морських дронів, показує, що для України дуже актуальною є задача створення морських дронів для виконання різних задач. Це можуть бути надводні, напівзанурені та підводні дрони-камікадзе, надводні та підводні багатоцільові безекіпажні катери різних розмірів та архітектурно-конструктивних типів [1]. Основна задача – створення найбільш ефективних дронів.
Основною метою даної роботи є дослідницьке проектування швидкісної платформи дрону з малою площею ватерлінії.
В період війни основними задачами морських дронів є:
– знищення ворожих кораблів в гаванях та відкритому морі;
– скритна висадка невеликих груп для виконання задач у тилу противника;
– знищення ворожих дронів-камікадзе над морем;
– постановка морських мін для захисту прибережної зони України;
– доставка невеликих морських дронів-камікадзе у район проведення атаки, управління роєм дронів-камікадзе в момент атаки.
При цьому експлуатація таких дронів може бути як у відкритому морі, так і в Дніпро Бузькому лимані.
У мирний час основними задачами морських можуть бути:
– проведення патрулювання у відкритому морі з метою виявлення суден-браконьєрів та інших порушників морських кордонів держави;
– розмінування територіальних вод України;
– проведення екологічного контролю та моніторингу навколишнього середовища;
– проведення морських наукових досліджень;
– прибирання сміття у відкритому морі;
– участь у пошуково-рятувальних роботах.
Виходячи з розглянутих задач одним із оптимальних рішень є створення малої платформи-дрону довжиною до 15 м з високо морехідними якостями.
Попередній аналіз різних концепцій швидкісної малої платформи-дрону показує, що можливе використання наступних концепцій: однокорпусного, катамарану, судна з малою площею ватерлінії, тримарану та інших гібридних варіантів цих концепцій.
У діапазоні 10-15 метрів найкращу морехідність мають судна з малою площею ватерлінії. Так за даними роботи [2] на 25 метровому СМПВ при висоті хвиль до 4 метрів крен не перевищував 5-6 градусів.
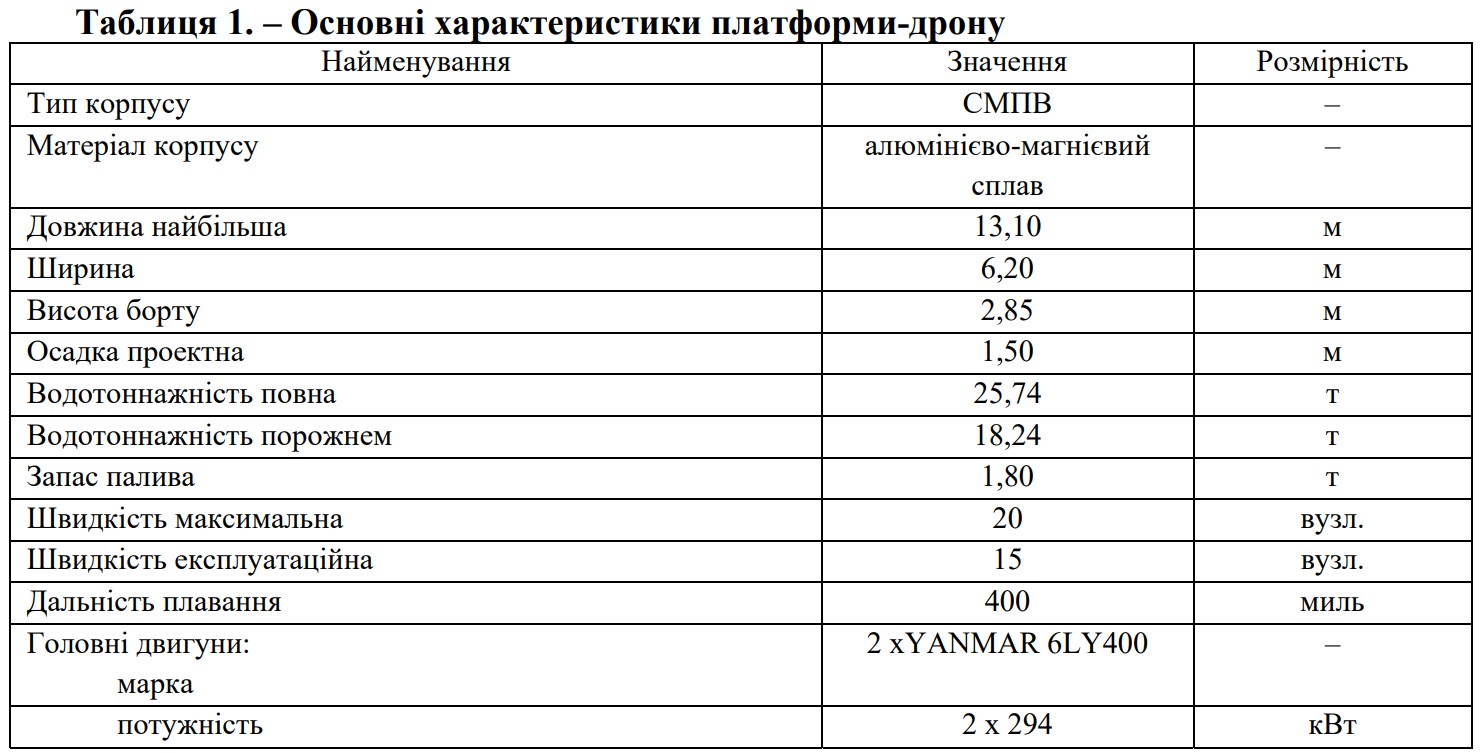
Виходячи з цього, авторами було запропоновано проект морської платформи-дрону на основі концепції судна з малою площею ватерлінії. Основні проектні характеристики проекту наведено в табл. 1.
Основні вимоги до проекту:
– довжина повинна бути близько 12…13 метрів;
– передбачити можливість встановлення різного модульного обладнання в залежності від поставленої задачі;
– максимальна швидкість руху не менше 20 вузлів без значного зменшення в умовах руху при стані моря 3-4 бали;
– дальність плавання не менше 400 миль.
Вибір головних розмірів проводився за алгоритмом на основі наукових публікацій [3 – 6].
При розробці проекту морської платформи-дрону авторами було використано напрацювання щодо визначення навантаження мас [5].
При розрахунках ходовості морської платформи-дрону використано залежності зі статті [6]. Результати розрахунку потужності головного двигуна наведено на рис. 1.
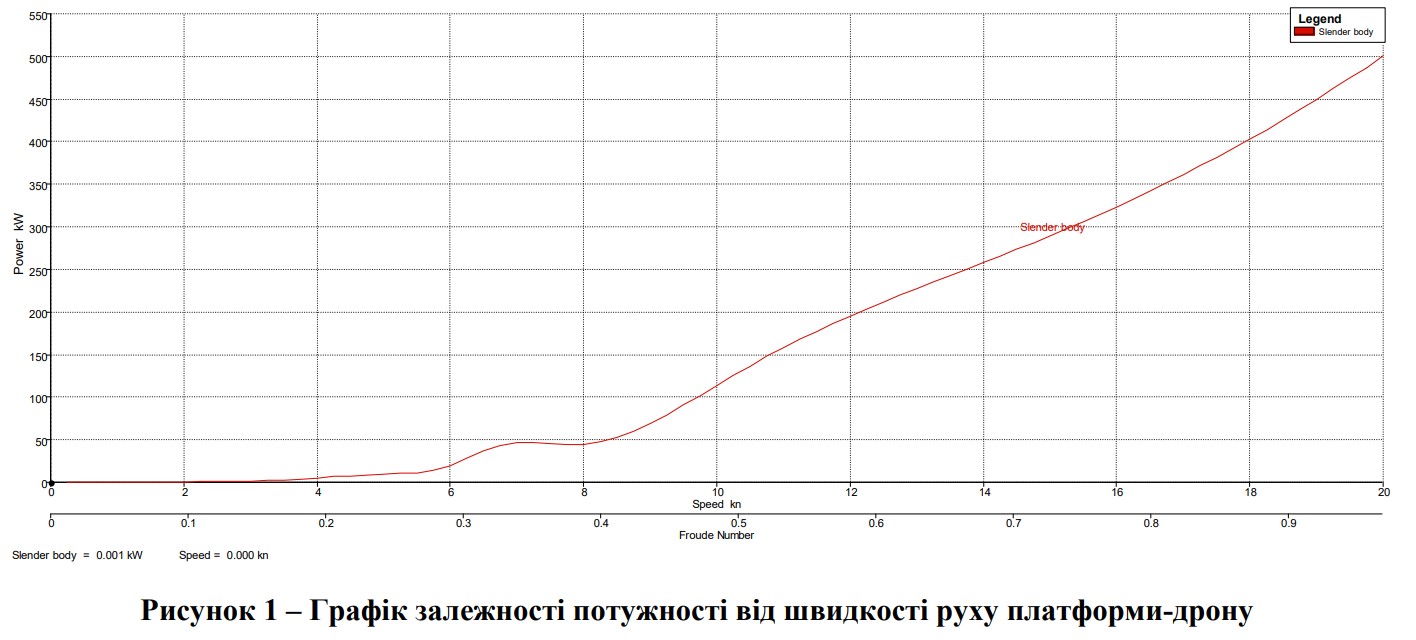
В якості енергетичної установки було використано дизельні двигуни, які приводять в рух гвинти фіксованого кроку.
Основною проблемою при розробці даного проекту була складність розміщення двигунів у підводних корпусах. Ця проблема була вирішена застосуванням на підводних корпусах в районі машинного відділення потовщення і вибором двигунів з мінімальними габаритами.
Висновок. Малі швидкісні морські платформи-дрони є ефективним засобом в протистоянні з кораблями противника на Чорному морі. Запропонований проект морської платформи-дрону зможе забезпечити вирішення багатьох задач як для Військово-морських сил Збройних сил України, так і господарського комплексу України в післявоєнний період.
REFERENCES
[1]. Seto M. L. Marine Robot Autonomy Springer New York, NY, 2012, 382 p.
[2]. Carsten-S. Wibel SWATH@A&R – reliable platform for technologies and sensors. EOOS Technology Forum Report 2022.
[3]. Boiko A.P., Bondarenko O.V., Davydenko Y. Hull Parametric Modeling of a Small Waterplane Area Twin Hull Ships, Proceeding of the IEEE CADSM 2019 Conference, Polyana Svalyava (Zakarpattya), Ukraine, February 26 – March 2, 2019, Р. 6/1-6/4.
[4]. Zvaigzne A., Bondarenko O. Efficiency Analysis of a Small Universal Platform Type SWATH. In: Kabashkin I., Yatskiv I., Prentkovskis O. (eds) Reliability and Statistics in Transportation and Communication. RelStat 2019. Lecture Notes in Networks and Systems, vol 117. Springer, Cham. – Р. 176-186.
[5]. Boiko A.P., Bondarenko O.V. Calculation of Weight of a SWATH Ship in Preliminary Design Stages Journal of Ship Technology, Vol. 5, No. 2, July 2009, pp. 34–38. [6]. Bondarenko O.V. Determination of the main characteristics of the small waterplane area twin hull ships at the initial stage of design POLISH MARITIME RESEARCH. – 2013. – #1(77), Vol. 20. – P.11–22.
Джерело – Олександр Бондаренко, к.т.н., професор, директор Кораблебудівного інституту НУК, зараз в лавах ЗСУ.